La compañía tecnológica Nvidia ha revelado recientemente una innovadora herramienta que promete dar un giro radical a la industria de la robótica. Se trata de Cosmos Policy, una tecnología diseñada para que los robots tengan la capacidad de anticipar diversos escenarios antes de ejecutar cualquier movimiento físico. Esta propuesta busca perfeccionar el control y la planificación de los sistemas autónomos, especialmente en entornos que cambian de manera constante.
Esta iniciativa se encuentra integrada dentro del ecosistema Cosmos, una plataforma orientada al desarrollo de modelos de mundo. El objetivo principal es que las máquinas logren comprender cómo evoluciona su entorno a través del tiempo, lo que facilita enormemente la toma de decisiones en situaciones de alta complejidad.
El planteamiento de Nvidia se sustenta en el procesamiento de masivos volúmenes de datos de carácter visual. Gracias a esto, los sistemas pueden aprender la dinámica de la realidad y aplicar dicho conocimiento al momento de trazar sus planes de acción. Con este avance, los robots dejan de ser simples máquinas reactivas para convertirse en entidades con un comportamiento más estratégico, logrando que la inteligencia artificial (IA) alcance niveles superiores de eficiencia y autonomía.
Un giro estratégico en el control de sistemas robóticos
En el ámbito técnico, lo que se conoce como política de control es el proceso que permite transformar la información recibida por sensores y cámaras en acciones físicas directas. Hasta ahora, el estándar consistía en diseñar redes neuronales exclusivas para cada labor, separando los módulos de percepción, planificación y control. No obstante, este método tradicional exige una enorme cantidad de datos etiquetados y ajustes específicos para cada tipo de entorno o robot.
La arquitectura de Cosmos Policy propone un esquema distinto al aprovechar un modelo de predicción de video que ya ha sido entrenado previamente, denominado Cosmos Predict. En su fase de adaptación, el sistema logra unificar las acciones de la máquina, sus estados físicos y los resultados finales en una sola representación temporal. Esta estructura simplificada permite que el robot prevea, de forma simultánea, qué acciones tomará, qué consecuencias tendrán estas en su estado y qué tan probable es que complete su tarea con éxito.
De acuerdo con la información proporcionada por la empresa, el sistema ha demostrado excelentes niveles de eficacia en pruebas de manipulación que requieren un razonamiento lógico a largo plazo. Se destaca que, en diversas comparativas, la eficiencia fue igual o incluso mayor a la de tecnologías actuales, pero con la ventaja de requerir un menor número de demostraciones previas. Este punto es crucial, dado que obtener datos reales en robótica suele ser un proceso extremadamente lento y costoso.

Un aspecto fundamental de esta evolución es la capacidad del sistema para realizar una planificación exhaustiva durante la ejecución en tiempo real. La tecnología no se limita a pensar en el siguiente movimiento inmediato; por el contrario, el modelo es capaz de generar y examinar múltiples secuencias de acciones a futuro, eligiendo siempre la ruta que ofrezca mejores pronósticos de éxito según los resultados previstos.
Planificación, eficiencia y aplicación en situaciones reales
La característica que realmente diferencia a Cosmos Policy es su enfoque en la planificación en tiempo de ejecución. Al evaluar diversas alternativas futuras y calcular sus probabilidades de acierto, los robots pueden manejarse de una forma más estratégica en la resolución de tareas complejas, evitando reacciones bruscas ante imprevistos.
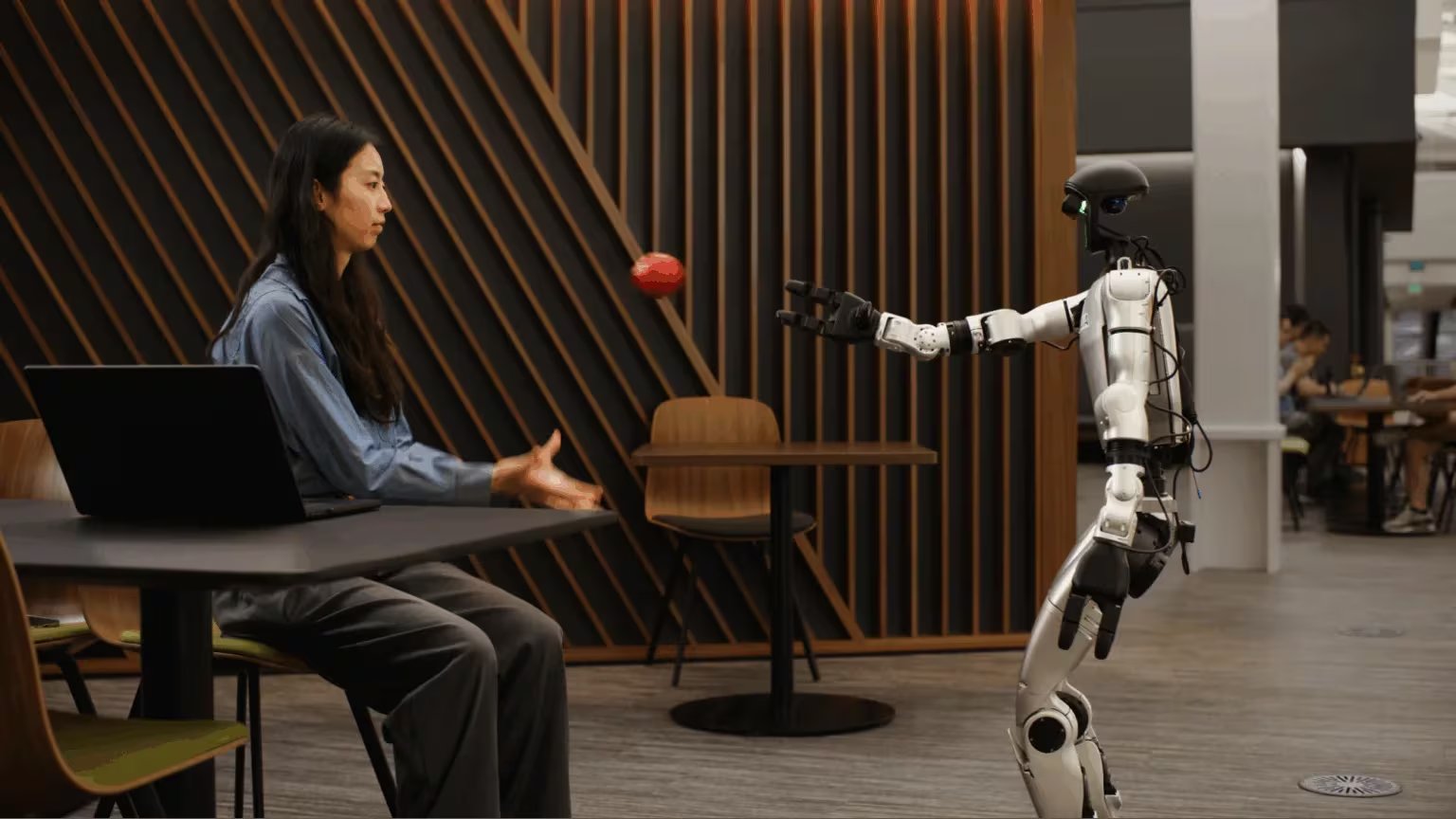
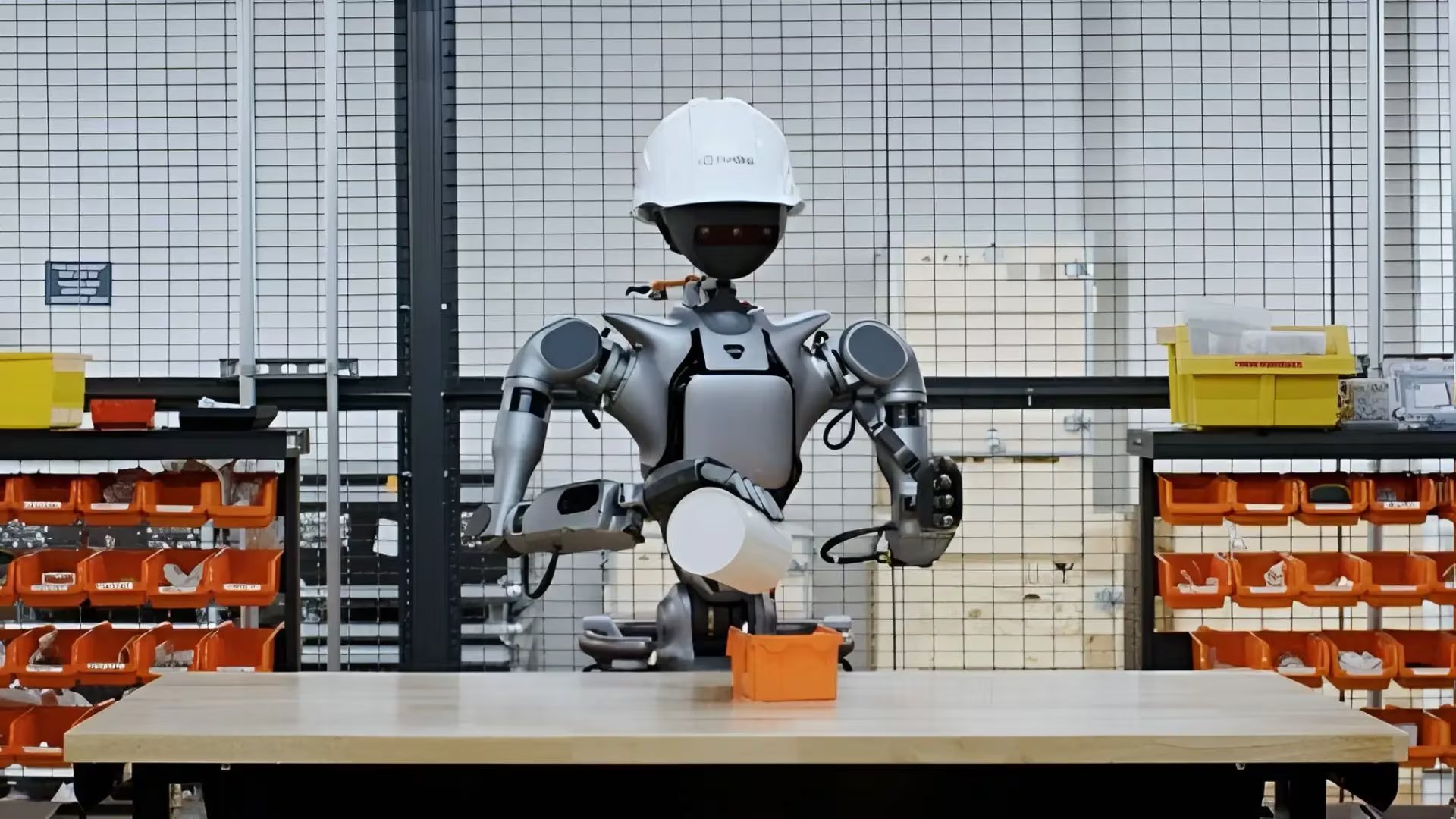
En ensayos realizados en escenarios físicos reales, esta tecnología fue capaz de ejecutar labores de manipulación bimanual (con dos manos) utilizando solamente información visual. Estos resultados indican que el modelo de Nvidia tiene un alto potencial de transferencia, facilitando la implementación en robots que interactúan directamente con el mundo real, más allá de las simulaciones controladas.
El desarrollo de Cosmos Policy es parte de una ambición mayor de Nvidia: crear modelos de mundo generalistas que funcionen como una base compartida para todo tipo de sistemas autónomos. Con esto, se busca minimizar la necesidad de realizar ingeniería personalizada para cada robot, permitiendo que las máquinas entiendan y actúen con una autonomía sin precedentes.
Finalmente, cabe destacar que esta innovación se presenta como una base técnica para el avance de controles robóticos y no como un marco normativo o estándar de seguridad. Los aspectos vinculados a la gobernanza, regulación y medidas de seguridad seguirán bajo la responsabilidad de organismos externos y sistemas de supervisión jerárquicamente superiores.
Fuente: Fuente