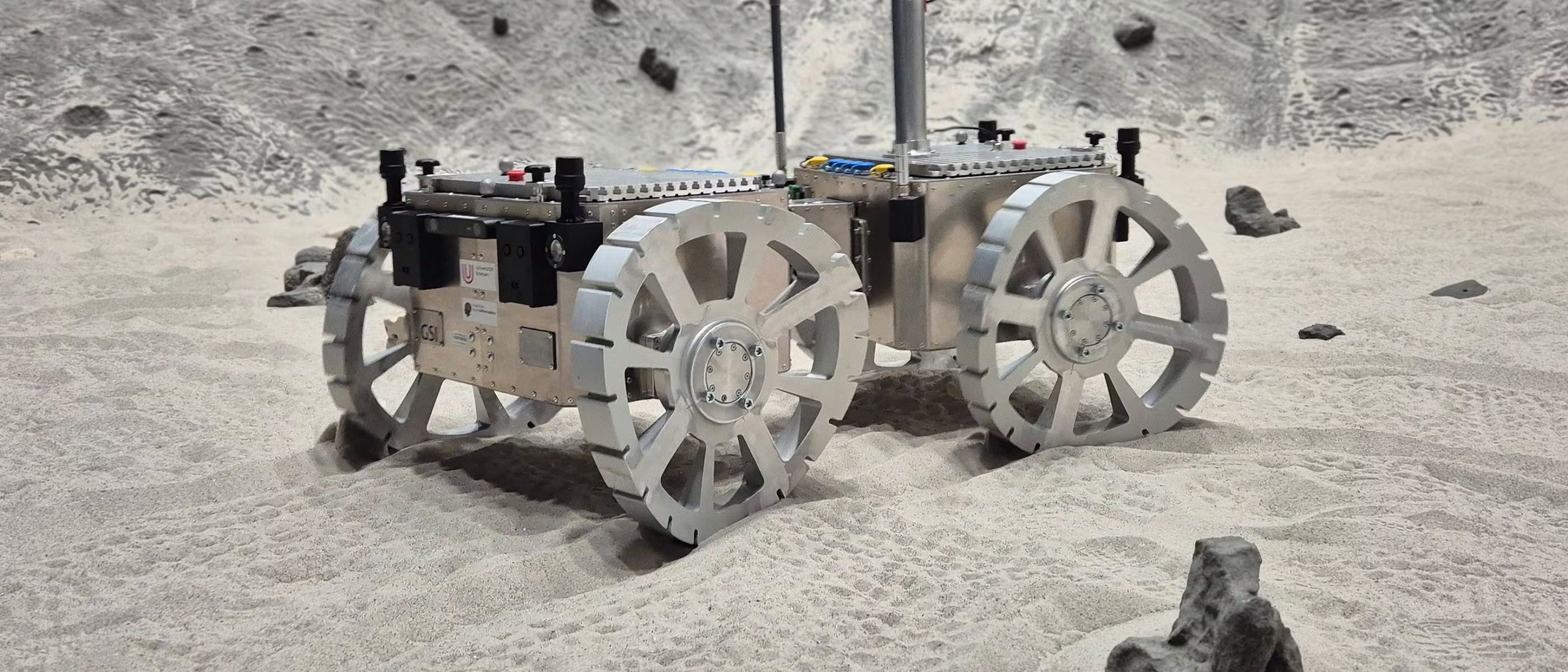
Los vehículos exploradores que logren desplazarse de manera dinámica sobre superficies arenosas en Marte representan un avance tecnológico que bebe directamente de la biología. Un equipo de la Universidad de Würzburg ha presentado una solución pionera: un rover cuyas ruedas no giran al uso tradicional, sino que replican el mecanismo de “nado” subterráneo del lagarto conocido como pez de arena (Scincus scincus).
Este desarrollo, fruto del trabajo en el laboratorio de Marco Schmidt, catedrático de Sistemas Integrados y Sensores para la Observación de la Tierra (ESSEO), promete superar las limitaciones de los diseños convencionales en entornos como el marciano, donde la movilidad y la estabilidad son determinantes para el éxito de cualquier misión espacial.
Las primeras pruebas experimentales, realizadas en colaboración con el Centro Alemán de Investigación en Inteligencia Artificial (DFKI) de Bremen y la Universidad de Bremen, demostraron la capacidad del vehículo para moverse con eficacia y estabilidad sobre terrenos arenosos. Según explicó el profesor Schmidt, esta validación resultó clave para identificar áreas de mejora:
“Los experimentos también nos proporcionaron pistas claras para realizar mejoras”.
En comparación con los prototipos iniciales, las nuevas ruedas —más anchas y ligeras— redujeron la presión sobre el suelo y minimizaron el hundimiento, lo que se tradujo en una maniobrabilidad notablemente superior.
El principio natural detrás del diseño
El funcionamiento de este vehículo retoma principios de la naturaleza que apenas se comprendieron en los últimos años. El lagarto pez de arena, oriundo del Sahara, se caracteriza por excavar y “nadar” entre los granos de arena, una táctica que le permite cazar y escapar de depredadores. Este patrón de locomoción, descrito como “sinusoidal”, fue replicado en las ruedas del rover, algo que, según la investigadora Amenosis López, del equipo de Würzburg, ofrece ventajas decisivas.
“Los diseños de ruedas convencionales suelen estar optimizados para conducir a bajas velocidades y tienden a resbalar, hundirse o atascarse en terrenos blandos”, advirtió López.
En la práctica, el rover inspirado en el pez de arena genera fuerzas longitudinales y laterales similares a las de su contraparte biológica, dejando huellas ondulantes en la superficie. Estos rastros visibles en la arena confirman la correcta traducción tecnológica del mecanismo animal, lo que aporta a la exploración marciana una eficiencia y adaptabilidad inéditas en locomoción robótica.
Mejoras específicas y control sobre terreno blando
Durante las primeras fases de prueba, el vehículo presentaba dificultades por el peso y el tamaño reducido de las ruedas, lo que provocaba una combinación de deslizamiento y hundimiento perjudicial para su control. Al modificar el diseño, con ruedas más anchas y livianas, la presión sobre el suelo disminuyó de forma significativa. De acuerdo con las conclusiones del grupo que dirige Schmidt, estos cambios “mejoraron la estabilidad y la maniobrabilidad del rover”. Las nuevas ruedas permiten al rover atravesar extensiones arenosas sin atascarse ni perder capacidad para sortear obstáculos en contextos planetarios desafiantes.
La validación experimental fue solo una parte del avance. Las pruebas en campo confirmaron que la solución biomimética no solo replica la eficiencia animal, sino que abre la puerta a nuevas exploraciones en superficies mixtas de Marte. El equipo anticipa que ajustes adicionales en la superficie de las ruedas podrán seguir optimizando el rendimiento de estos vehículos, permitiendo un tránsito aún más efectivo en ambientes granulares variables.
“Es probable que futuras mejoras en la superficie de las ruedas optimicen aún más su rendimiento en terrenos mixtos”, señaló la investigación difundida por la Universidad de Würzburg.
El proyecto, integrado en la iniciativa VaMEx del Centro Aeroespacial Alemán, busca ir más allá del perfeccionamiento mecánico. La próxima fase, según el equipo de ESSEO, consiste en trasladar los aprendizajes del diseño físico a estrategias de movilidad gobernadas por software.
El objetivo es desarrollar sistemas de control que monitoricen en tiempo real fenómenos como el deslizamiento y el hundimiento, lo que potenciará la estabilidad y la adaptabilidad del rover en un entorno marciano.
La ambición es integrar algoritmos inteligentes que permitan ajustar los parámetros de movimiento según la interacción entre rueda y terreno. Así, el vehículo se adaptaría de forma autónoma a las condiciones granulares que enfrentan los exploradores en otros planetas, consolidando una movilidad controlada no solo por características físicas, sino también por sistemas de software avanzados.
El proyecto VaMEx, respaldado por la cooperación entre Würzburg, Bremen y el Centro Alemán de Investigación en Inteligencia Artificial, representa la convergencia de biología, ingeniería mecánica e inteligencia artificial. La capacidad de “nadar” en la arena, emulando a especies que llevan millones de años perfeccionando este arte en la naturaleza, ofrece una nueva perspectiva para el futuro de la exploración robótica en contextos planetarios hasta ahora considerados impracticables por la limitación de la tecnología tradicional.
Fuente: Infobae